Full-stack navigation systems on Unitree Go2 and Diablo, aiming to provide a low-cost and ready-to-use platform for AI navigation research.
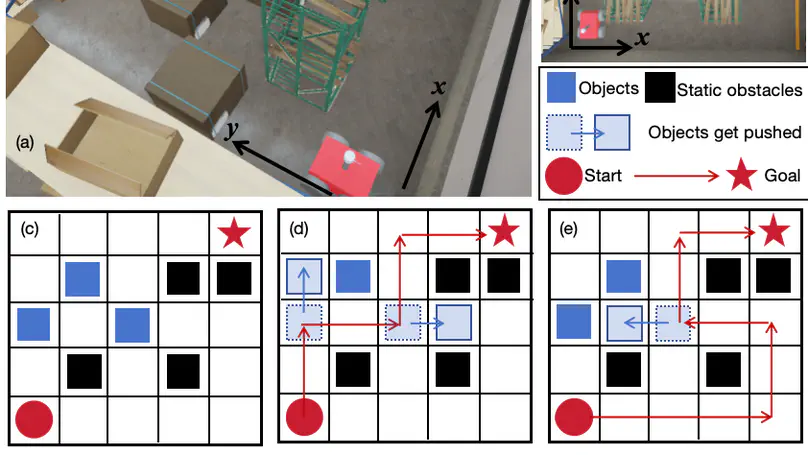
Search based planning algorithms on grid maps for solving path planning among movable obstacles problem.
An efficient navigation system that combines manipulating movable objects for shorter path, even in complex unknown environments.
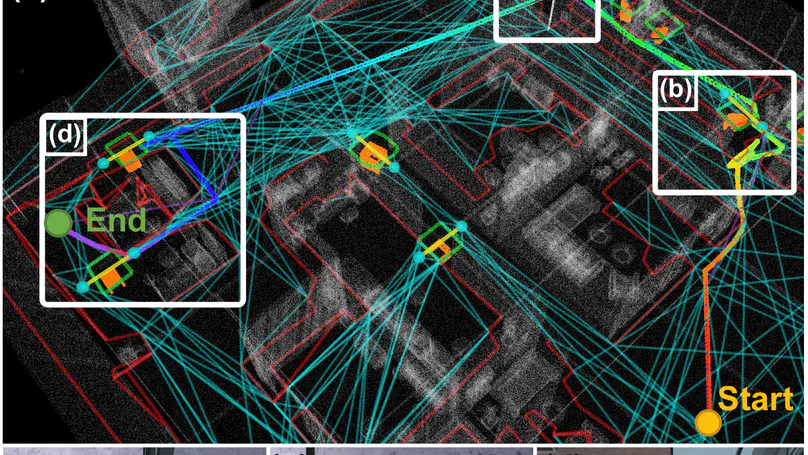
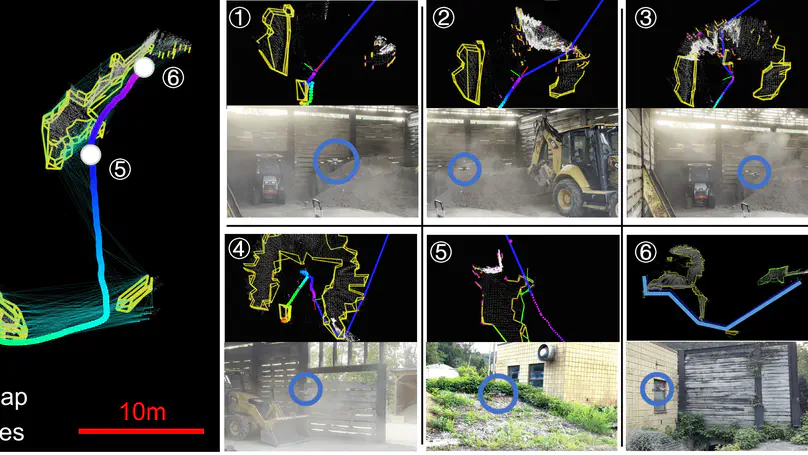
A real-time 3D mapping and path planning algorithm for aerial robot that is up-to x1000 times faster than grid-map based strong benchmarks.
An inference framework using deep network derived closely following optimal control principals for large-scale modeling chemical processes.